Research of the Vesely Group
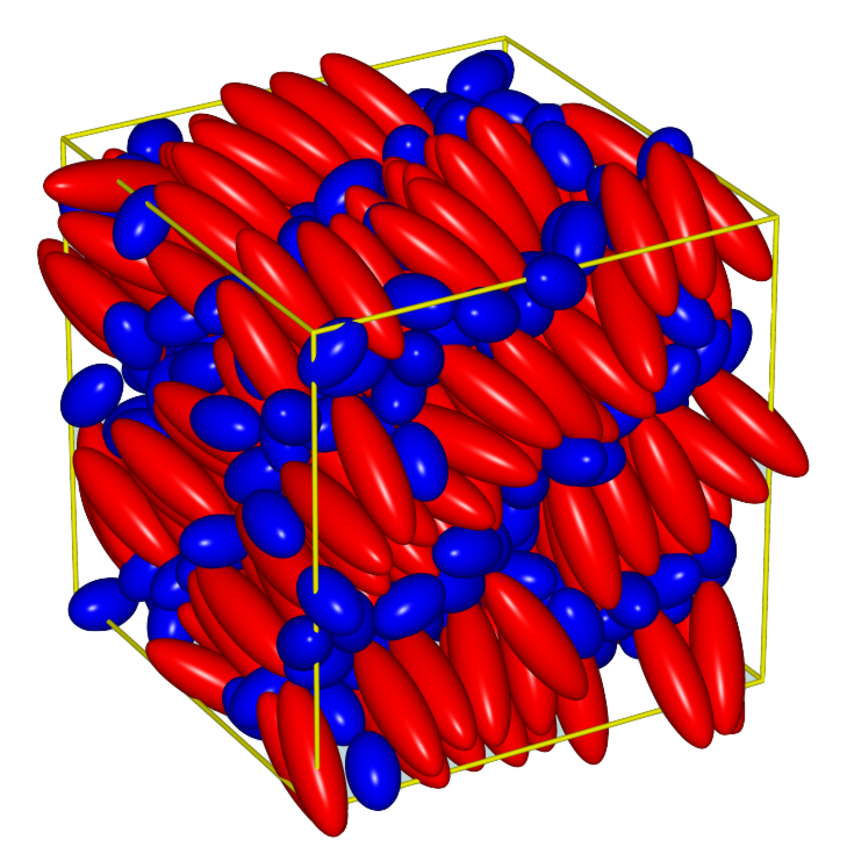
Smectic demixing
Smectic demixing in a (simulated) two-component liquid crystal mixture was further investigated. The demixing occuring at high densities was studied both by (NVT) Monte Carlo and by (NVE) molecular dynamics. To corroborate the results of the past studies we are now preparing (NpT) Monte Carlo simulations.
Director confinement
The "director" (i. e. the average axis orientation) in a computer sample of linear, axiosymmetric molecules is expected to be influenced by the artificial anisotropy of the simulation geometry. This influence will be even more pronounced if smectic layers have to "catch up" with themselves across the borders of the periodic cells. In other words, the dominant smectic wave vector has to coincide with one of the Fourier modes of the simulation supercrystal. Since these Fourier modes change upon compression, repeated breakup and reformation of smectic layers is necessary to approximately match the cell geometry. This is a spurious effect that severely hampers the simulations. To speed up the computation a method was devised to keep the director (and consequently the smectic vector) near a desired orientation, even while the cell is slowly shrunken to achieve a target density. The method consists in introducing a synthetic potential U=c*(d-d0)**2 coupling to the deviation of the director d from a given direction d0. It may be used in conjunction with MD or MC calculations.
Liquid crystal films
Liquid crystal films consisting of binary mixtures were studied by MC simulation. Strong orientational correlations were found for the longer molecules which tend to "anchor" at the cell walls.
Phase separation and wavelets
The separation of phases, be it upon condensation or demixing, is tantamount to a breaking of geometrical symmetry. In a computer simulation such symmetry breaking is difficult to quantify. We have devised a method using wavelets to diagnose deviations from homogeneity, both on local and global scales.
Robotics
Software tools for the realistic simulation of robot arm dynamics, including the effects of gravity and inertia, were obtained and tested.